The plug-in hybrid electric vehicle (PHEV) combines the advantages of pure electric vehicles (EV) and hybrid electric vehicles (HEV) to achieve pure electric zero-emission driving and to increase the driving range of the vehicle through the hybrid mode. In the post-subsidy period, government subsidies decreased, consumer mileage demand increased, battery cost decreased less, and vehicle prices could not rise, providing a development opportunity for PHEVs. Rationalization of hybrid solutions, integration of power systems, specialization of core components and innovative design of control strategies are key core technologies for improving PHEV performance.
1. Reasons for developing PHEV
1.1 PHEV meets technical route
The energy-saving and new-energy vehicle technology roadmap stipulates that by 2020, the average fuel consumption of new passenger cars will be 5L/100km, and by 2025, the average fuel consumption of new passenger cars will be 4 L/100km.
Figure 1 shows the trend of fuel consumption of traditional vehicles, HEVs and PHEVs with quality. As the quality of the kerbs increases, the fuel consumption of each model increases proportionally. It can be seen from Fig. 1 that the B-class car with a large quality of preparation must rely on PHEV technology to control the fuel consumption within 5 or 4L/100km, and the development of plug-in hybrid passenger vehicles based on the scale of compact models and above. "The technical route is consistent.

Figure 1 Relationship between vehicle fuel consumption and vehicle quality
1.2 Two-level subsidies have fallen sharply
According to the established plan for reversing the slope, the two-level subsidy for models over 250 km was reduced by 2.2 and 27,500 in Beijing and Tianjin respectively. Considering the cost of the whole vehicle, the reduction of the cost of parts and components is the most direct way to solve the subsidy retreat, but it is more difficult.
Table 1 Statistics of subsidies

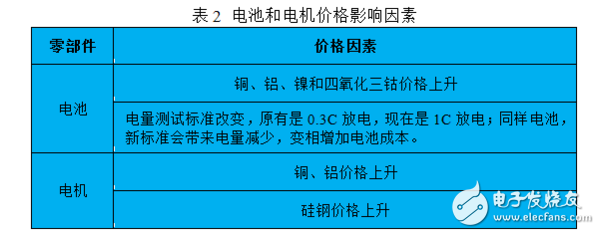
1.3 The price of parts has not dropped significantly.
In theory, the drop in the price of spare parts can reduce the pressure on subsidies to fall back. However, due to the recent increase in prices of copper and other materials, the price of spare parts in the first half of 2017 can only maintain the current state and fluctuate slightly, without a significant decline. Therefore, it is unlikely that the subsidy for the balance of subsidies will be reduced in the near future.
1.4 continued driving mileage continues to increase
Table 3 shows the statistics of the driving range of hot-selling models, and the demand for driving mileage continues to increase. In addition to the optimization of light weight and regenerative braking, the most direct way is to increase the battery capacity, which leads to an increase in the cost of the entire vehicle.
Table 3 Statistics on driving mileage of hot models

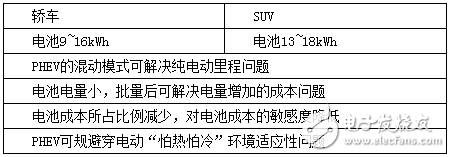
1.5 PHEV balances various constraints
PHEV balances the contradiction between subsidies, component prices and mileage increases. The hybrid mode of PHEV can solve the problem of pure electric mileage; the battery power is small, and the cost of power increase can be solved after batching; the proportion of battery cost is reduced, and the sensitivity to battery cost is reduced.
Table 4 PHEV comprehensive advantages
One of the resistances of PHEV in China is that after the vehicle is not charged, that is, after entering the energy maintenance CS stage, the vehicle is no different from the traditional vehicle at this time, giving "more than 95% of the owners are in the traditional gasoline vehicle. The mode runs the plug-in hybrid car, it is recommended to cancel the specific subsidy for plug-in hybrids. The author published the "plug-in hybrid = pure electric + strong hybrid pure electric + traditional car", explaining the PHEV without charging The principle of fuel economy. In the case of no charging, PHEV saves 30% more fuel than the same weight fuel car. This is the most basic condition for obtaining two-level subsidies. The PHEV with better performance can save 40% in the CS stage.
2. PHEV key core technology
2.1 Rational design of hybrid scheme
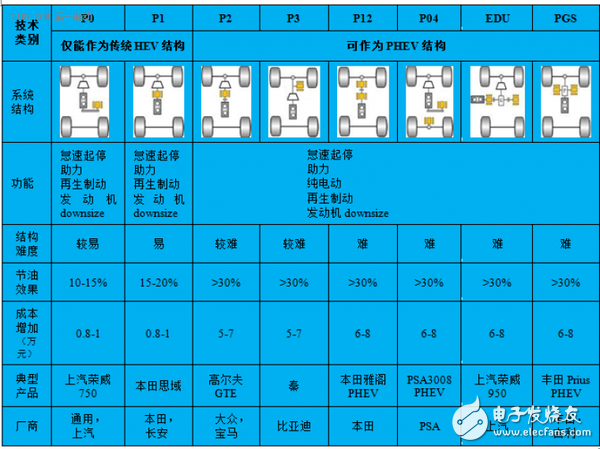
Table 5 is a comparative analysis of mainstream hybrid schemes at home and abroad. EDU represents SAIC's dual-motor, dual-clutch, two-speed AMT integration scheme; PGS is a planetary row coupling scheme; P series is defined according to motor position, P0 and P1 respectively Represents BSG and ISG schemes. These two schemes cannot achieve pure electric mode and cannot be used for PHEV. P2 and P3 respectively indicate that the motor is integrated at the input and output of the transmission, and P4 indicates the ERAD structure of the motor integrated in the rear axle. P04 indicates the former. The axis is the P0 scheme and the rear axle is the P4 structure. Mitsubishi Outlander is more complex, with the front axle being P12 and the rear axle being P4, which constitutes the P124 hybrid architecture.
It can be seen from Table 5 that various solutions can be realized as PHEV structure, which can achieve more than 30% fuel saving effect. Compared with other solutions, the motor and the stepped automatic transmission scheme are more suitable for independent brands, and the P2 and P3 schemes are more suitable for The self-owned brand new energy sedan, P04 can realize electronic full-time four-wheel drive function and is suitable for SUV.
Table 5 Comparison of various mixing schemes
2.2 Power System Integrated Design
The overall layout of the front compartment is one of the problems of the passenger car hybrid system. Since the engine, clutch and transmission are integrated here, the lateral dimension is very tight, and it is difficult to set a space of 50 mm for the ISG motor in the total arrangement, so many The solution abandoned the more efficient ISG solution and adopted the BSG solution to solve the general layout problem. GAC's GA5 extended program hybrid is based on the engine vertical solution, which is relatively easy to arrange, but poses a great challenge for NVH optimization when the engine is working. For plug-in hybrids where the engine starts and stops frequently, the longitudinal setting of the engine is not feasible.
The main reason for the difficulty in the overall layout is that the simple arrangement uses a simple iterative accumulation scheme, the more parts and the longer the lateral dimension.
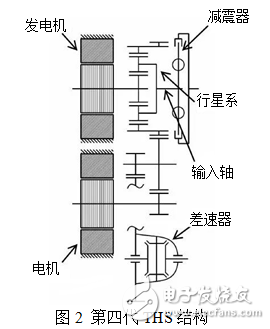
Toyota and other companies have made great progress in the direction of integrated design. As a THS system with global sales volume entering the market, it is still exploring the optimization design problem of hybrid systems. The latest fourth-generation THS drive motor MG2 is no longer coaxial, is decelerated by a reverse driven gear, and is combined with the ring gear of the planetary gear set. Based on the new gear drive, the new motor and the parallel arrangement of the two motors, the structure is more compact and lighter, while the torque is not much different. The total length is reduced by 47mm compared to the third generation, and the number of parts and total weight are reduced by 20% and 6.3%, respectively.
2.3 Core component specialization design
For common P2 or P3 constructions, a damping system or clutch can be integrated into the rotor of the motor to reduce lateral dimensions. Companies such as Getrag are also experimenting with the structural approach of integrating motors into DCTs, fundamentally addressing the spatial size challenges of the overall layout of the front compartment.
In recent years, the development of pure electric vehicles has driven the rapid improvement of electric drive technology. The large-scale mainframe factories have mastered the complete vehicle electronic control technology, and some manufacturers have passed the strict certification of ISO26262. Motor and controller technology can be compared to the world's advanced level, and accessories such as distribution boxes and chargers have also developed rapidly. For PHEVs, engine and automatic transmission technology still needs to be strengthened, especially the Atkinson cycle engine and automatic transmission with electric oil pump.
2.3.1 Special engine
Compared with the increased-mixing power, the PHEV engine works more frequently. In the start-stop, assist, driving, and series modes of the energy-maintaining CS phase, the engine is required to participate in driving, and the battery SOC is maintained at a constant value (for example, 20%). )nearby. Even in the energy consumption CD stage, in the acceleration mode in which the accelerator pedal opening degree is large, in order to meet the vehicle acceleration demand, the engine assist drive is required, for example, the Volanda has a large pedal opening degree, even if the battery SOC is high, the engine Will still participate in the drive immediately.
It can be seen that the engine performance has a great influence on the plug-in hybrid performance, especially the thermal efficiency of the engine directly affects the CS phase and the overall fuel consumption.
Table 6 shows the engines of several representative PHEVs on the market. It can be seen from the table that the representative vehicles of Japan and the United States are equipped with the engine of the Atkinson cycle characteristics, paying attention to the fuel consumption of the vehicles, and the traditional automobile turbocharged mode is adopted in Europe. Highlights dynamic performance. The domestic BYD Qin and SAIC Roewe 950 are similar to those in Europe, with a supercharged engine.
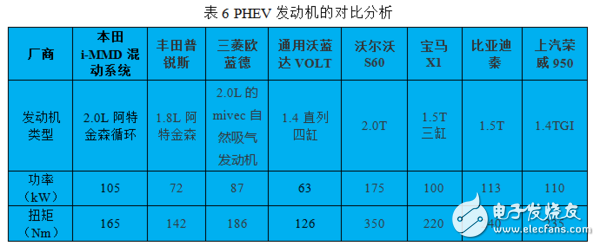
Table 7 shows the characteristics of three typical Atkinson cycle engines. The thermal efficiency is greater than 38%, even 40%, and the specific fuel consumption is less than or equal to 220g/kWh. The turbocharged engine has a minimum fuel consumption of 240 g/kWh. Angle performance is not as good as the Atkinson cycle engine.
Table 7 Atkinson engine characteristics
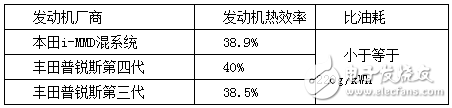
Tian Yage double-motor hybrid vehicle, weighing 1.723 tons, the fuel consumption is only 5.1L/100km in the SOC balance phase, the third generation Prius with 1.435 tons, the fuel consumption is only 4.7L/100km, the fourth generation system The fuel consumption is lower; the fuel consumption of Corolla and Ralink ordinary hybrid vehicles is only 4.2L/100km; the Atkinson engine with such low fuel consumption, high thermal efficiency and low fuel consumption is one of the main reasons.
The domestic comprehensive fuel consumption is 1.6L/100km PHEV. After the conversion according to GB/T 19753, the fuel consumption in the CS stage is above 6.1L/100km, which is far from the foreign countries.
Therefore, the domestic PHEV should also try to use the Atkinson cycle engine to reduce the fuel consumption in the CS stage, so that even if it is not charged, it can achieve the goal of energy saving. Some auto companies in China have successfully developed the Atkinson cycle engine in 2009. It is obvious that they have the R&D capability in this area, and the subsequent matching and loading of this type of engine should be increased.
2.3.2 Automatic Transmission
The development of domestic automatic transmission technology lags behind the development of vehicle technology. Even traditional vehicles, except for Chery CVT and BYD DCT technology, SAIC DCT, Qingshan DCT, Beiqi CVT, Rongda CVT, Shengrui 8AT, Geely The introduction of DSI's AT and Huatai 6AT technology in the early stage has achieved certain development, but compared with foreign advanced automatic transmission technology, the gap is very large, and it has never broken through the electro-hydraulic integrated difficulty technology unique to automatic transmission.
Plug-in hybrid power has special requirements for the gearbox because it has a pure electric operation mode. It should be specially designed, as shown in the following four points in Table 8.
Table 8 Special design of PHEV transmission

The types of transmissions used by mainstream PHEVs at home and abroad are shown in the following table. It can be seen that all kinds of transmissions have their own advantages and have entered the PHEV application category. The main engine factory should select the suitable PHEV for its own based on the research and development of the power system. power system.
Table 9 PHEV transmission type analysis

Automatic transmission is an important part of power coupling and transmission in PHEV. With the large amount of research and development investment in PHEV, PHEV will in turn promote the development of autonomous automatic transmission technology.
2.4 Control strategy innovative design
The control strategy has a great influence on the fuel consumption of the PHEV in the CS stage. The control objective is to make the engine work in the high-efficiency zone while minimizing the number of energy conversions and comprehensively reduce the fuel consumption.
The hybrid system matching the DCT, AMT and AT has a staged automatic transmission. It is the mainstream of domestic PHEV. For this type of control system, the two-parameter or three-parameter shifting rules and the three-wire four-zone torque distribution method are the main control currently used. method. The disadvantage of the related control method is that the two-parameter or three-parameter shifting rule is not applicable to the PHEV system of multi-power source; in terms of torque distribution, the engine is operated on the optimal fuel economy curve or efficiently by motor assist or driving power generation. District, although the engine efficiency is improved, due to the continuous conversion of electrical energy and mechanical energy during power generation or power generation, resulting in increased power consumption, the overall fuel consumption of the vehicle is not optimal, and the consideration is not comprehensive.
Since 2001, the author has been involved in hybrid research projects, sharing shifting rules and torque distribution strategies based on power consumption compensation based on research accumulation.
2.4.1 Optimization of control methods
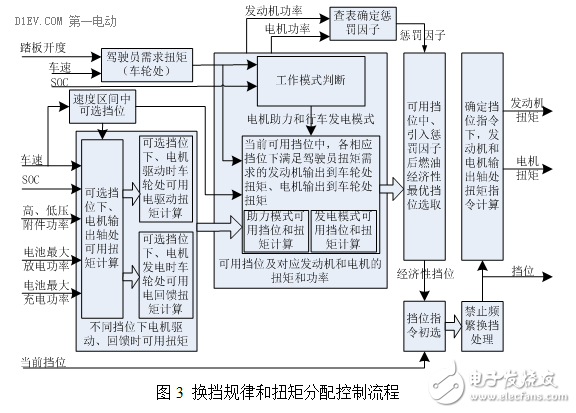
In the control strategy based on power consumption compensation, the reference vehicle speed, demand torque and working mode are used to determine all possible gear and torque distribution combinations. The gears and torques corresponding to the lowest combination of the engine fuel consumption correction are the engine and the motor. Control instruction. The specific fuel consumption correction means that a penalty factor is superimposed on the engine specific fuel consumption value according to the motor power, which reflects the comprehensive consideration of the electric power consumption of the electric component; and the penalty factor is related to the engine output power, and the motor power is constant. The smaller the engine power, the larger the penalty factor, and vice versa. Figure 3 is a block diagram of the shift schedule and torque distribution control flow.
Taking the 7-speed P2 structure PHEV as an example, the control method is illustrated.
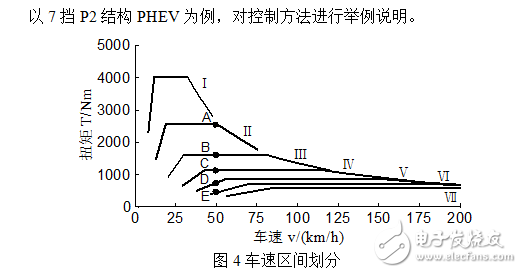
Curve I in Fig. 4 shows the relationship between the torque transmitted by the engine to the wheel and the vehicle speed when the transmission is in the first gear and the engine is running in the speed range (800 to 6000 rpm) of the optimum fuel economy curve. Similarly, curves II to VII represent the torque curves of the 2 to 7 gears and the engine transmitted to the wheels.
Assuming that the vehicle speed is 50 km/h, it is judged according to the accelerator pedal and the vehicle speed, and the demand torque is 2000 Nm at this time. As can be seen from Fig. 4, the engine speed can be between 800 and 6000 rpm at 2 to 6 speeds, and the engine speeds are n2, n3, n4, n5 and n6 at 2 to 6 speeds. N2~n6 respectively interpolate the corresponding torque on the OEC curve, multiply by the gear ratio, the final reducer speed ratio and the transmission efficiency to obtain Te2, Te3, Te4, Te5 and Te6, as shown in Figure A, B. C, D and E are shown. If the driving assist mode is at this time, since the torque at point A is greater than the demand torque, the engine will be far away from the optimal economic curve when the motor outputs power, and the economy of the vehicle is not good, so the engine provides the demand separately in the second gear. Torque, Te2, M output torque is 0; 3 to 6-speed engine best economic point torque is less than demand torque, if so, battery discharge power and motor output torque can compensate engine torque, make the engine work B ~ E point, The motor output torques Tm3, Tm4, Tm5 and Tm6 are calculated. According to the torque and the rotational speed, the engine output powers Pe3, Pe4, Pe5 and Pe6, and the motor output powers Pm3, Pm4, Pm5 and Pm6 are obtained when the engine is operated at points B to E. (n2, Te2), (n3, Te3), (n4, Te4), (n5, Te5) and (n6, Te6) in the engine, the specific characteristics of the fuel consumption are g2, g3, g4, g5 and g6, respectively, the engine The universal characteristic data should consider the acceleration of the crankshaft and the specific fuel consumption of the interpolation is consistent with the actual vehicle. (Pe3, Pm3), (Pe4, Pm4), (Pe5, Pm5) and (Pe6, Pm6) are interpolated to the specific fuel consumption correction values ​​Δg3, Δg4, Δg5 and Δg6. The fuel consumption correction mainly considers the influence of power consumption. Although the engine has the lowest fuel consumption at a certain gear position, if the motor output power is large and the loss of the motor and the battery increases, the power system may not be the optimal economy. select. Since the output power of the motor is 0 in the 2nd gear and the fuel consumption is the g2 in the combined ratio, the combined specific fuel consumption is 3g, △g3, g4+△g4, g5+△g5 and g6+△g6, respectively. The lowest gear of the overall fuel consumption is determined. The target gear, the corresponding engine and motor output torque is the target torque of the corresponding component.
If this is the driving mode, the engine will work at the A point corresponding torque and the surplus power will be charged by the motor to generate the battery in the 2nd gear; the optimal torque of the engine will be less than the demand torque when the 3rd to 6th gear is used, if the engine is driven separately to meet the demand, pure engine The working condition is economical; the target gear and the target torque can be determined by referring to the determination step of the driving assist mode.
Control command arbitration and output should avoid frequent shifts, limit the minimum time between two adjacent shifts (for example, 5s), and output the final gear and torque command.
The rest of the conditions are similar to the above control process.
2.4.2 Analysis result verification
Taking two typical bus SUVs as an example, various strategic performances were analyzed and calculated. The quality of passenger cars and SUVs was 12 tons and 1.9 tons respectively.
In terms of torque distribution, the three-line four-zone and five-wire six-zone methods are widely used. The three-wire four-zone model refers to the engine's universal characteristic graph divided into four working areas by external characteristics, optimal fuel economy and minimum working torque curve; A fuel curve is added to the upper and lower fuel economy curves. The pure engine working area between the two curves is called the five-line six-zone;
The performance of various strategies is shown in Table 10. The first two are the most commonly used "two parameters + three lines and four zones" and "two parameters + five lines and six zones" in engineering practice; the third and fourth are based on power consumption compensation. The control method, the third method indicates that the penalty factor is 0, and the penalty factor in the fourth method is set according to the actual parameters.
Table 10 Vehicle fuel economy

Compared with the first and second methods, the third and fourth fuel economy are greatly improved, which proves the rationality of selecting a better combination from a variety of gear and torque distribution combinations. The fourth method is superior to the third one, demonstrating the necessity of using the penalty factor to correct the engine specific fuel consumption. In short, compared with the commonly used first and second methods, the fourth method based on power consumption compensation increases by 6.60% and 4.60% on the SUV, respectively, and 9.72% and 9.32% on the passenger car respectively, which proves the new control. The advantages of the method.
3. Summary
Plug-in hybrid vehicles can balance the contradiction between subsidies, component prices and mileage demand, which is in line with the national electrification development strategy and is a useful supplement to pure electric platform technology. Rational design of hybrid scheme, integrated design of power system, special design of core components and innovative design of control strategy are the key core technologies of PHEV. At home and abroad, core technologies are in the stage of development and exploration. The core technology research and development investment promotes the rapid development of PHEV core technology.
Our surface mount box could include the CAT5E CAT6 CAT6A RJ45 Connectors
The surface mount box is an ideal for wall box and wire installation, we design many junction box, back mount box, blank mount box, loaded surface mount box.
Mateiral: ABS, PBT UL94V-0
1~8 ports and colors supply for your choice, they are an ideal for low voltage application for your security, data, networking solutions and telecom projects.
blank surface mount box, junction box, surface mount box, loaded surface mount box in China supplier
NINGBO UONICORE ELECTRONICS CO., LTD , https://www.uonicore.com